
引言
3月27日至29日,上海徐汇,2026全球开发者先锋大会。
一场名为《端到端大模型在无人车上的应用和探索》的工作坊,吸引了众多开发者的目光。
台上,斑陌易行的技术团队没有画大饼,没有讲愿景,而是从技术路线、论文拆解到工程化部署,一步步拆解无人车的“智慧大脑”是如何炼成的。
这家成立不久的公司,凭什么敢在开发者大会上“亮家底”?
答案藏在它的产品和技术里——首款无人配送车T6、自研Smartware 2.0中间件、550 TOPS算力平台,以及一套“工程能力底座+核心算法+开放生态”的全栈技术路线-5-9。
(参考阅读请点击:《斑陌易行T6:无人配送车“黑马” ,6立方货箱、550 TOPS硬件平台、360°全景感知,“乐高”式设计!京东顺丰们该紧张了?》)
一、 从“翻译团队”到“直觉大师”:端到端为何是无人车的“终极答案”?
要理解斑陌易行在做什么,首先要明白传统自动驾驶系统有多“笨”。
过去的系统,就像一个庞大的“翻译团队”:
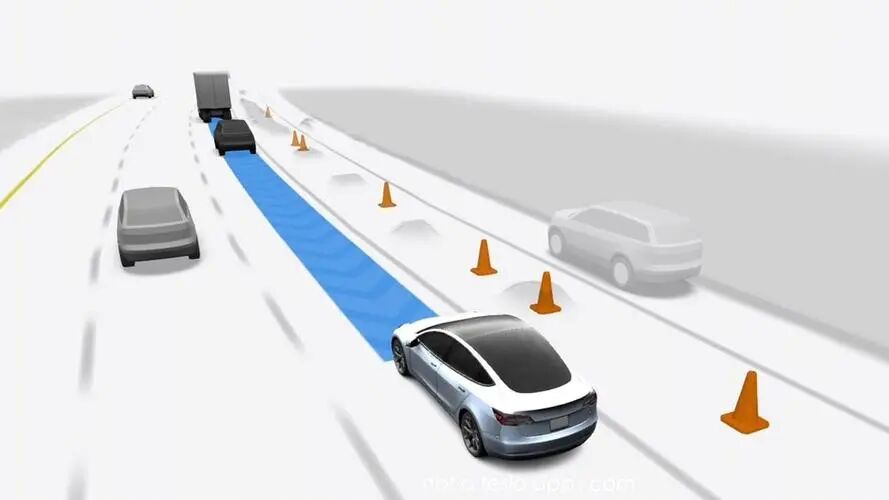
摄像头、激光雷达像“眼睛”看到原始画面(像素和点云),交给“感知模块”翻译成“那里有个行人,速度每秒1米”;
然后“规划模块”根据交规和地图,制定一条路线;
“控制模块”再把这个路线翻译成方向盘、油门刹车的具体指令。
这个流程,环节多、延迟高,而且任何一个模块的“误译”都会导致最终决策出错。
面对中国街头突然窜出的外卖车、不守交规的行人等“Corner Case”(长尾场景),这套系统需要工程师手动编写海量规则去“打补丁”,成本高昂,且能力上限明显。
端到端大模型,则是要干掉这个“翻译团队”,培养一个“直觉大师”。
它跳过了所有中间模块,让一个统一的、超大规模神经网络,直接“吃”进去传感器原始数据(主要是摄像头视频),然后“吐”出来车辆的控制指令(方向盘转角、油门刹车)。
它不依赖预设的高精地图,而是像人一样,靠“看”来理解道路结构;
它不运行“如果-那么”的规则,而是基于在海量人类驾驶数据中学到的“模式”和“常识”来决策。
斑陌易行的技术负责人朱宝伟明确指出,这条技术路线已成为“绝对主流”。
因为它带来了革命性的优势:延迟更低、决策更拟人、且具备“自进化”潜力。
系统处理信息的链条被极度压缩,反应更快;模型通过持续吸纳真实运营数据,能像人一样从经验中学习,应对未知场景的能力会越来越强。
这正好切中了当前无人配送行业的最大痛点:要大规模铺开,必须把高昂的、需要人工反复调试的“落地成本”打下来。
一个能在北京学会避让三轮车,到了成都就能自动理解当地交通习惯的“通用大脑”,无疑是实现规模化的终极武器。
二、 创业公司的“破局”智慧:没有千亿参数,就用工程化“巧劲”
然而,打造这样一个自动驾驶“大脑”谈何容易。
特斯拉有全球百万辆车队收集数据,有自研的Dojo超级计算机训练模型;
Waymo、百度Apollo也都耗费了十年时间和数十亿美金。
对于斑陌易行这样的创业公司,数据和算力是先天短板。
它们的“破局”策略,展现了一种极其务实的中国式创新智慧:不以构建“全能通用大模型”为目标,而是聚焦“垂直场景”,用顶尖的工程化能力,将开源模型和有限数据的效果“榨取”到极致。
他们的策略很清晰:
1、拥抱开源,灵活微调:
不从头训练一个基座模型,而是基于业内开源的优秀视觉-语言-动作模型(VLA)进行“精雕细琢”式的微调。
这就像站在巨人的肩膀上,用自己特有的场景数据(比如物流车在小区窄路、园区内部道路的行驶数据)去“教育”这个通用模型,让它更懂“快递车该怎么开”。

2、死磕工程,打造“转换器”:
算法模型是“大脑”,但要让这个大脑能控制不同品牌、不同型号的无人车“身体”,需要强大的“中枢神经系统”——这就是工程中间件。
斑陌易行自研的Smartware中间件,就像一套“万能适配器”,能把AI模型输出的决策,精准、稳定地翻译成不同车辆底盘能听懂的控制指令。
这项能力,恰恰是很多纯AI算法公司最欠缺的,却是实现技术复用的关键。
3、构建数据闭环,小步快跑:
通过真实的车辆运营,不断收集“难例”数据(那些让AI犯糊涂或处理不好的场景),再回灌到模型中进行针对性训练,形成“路上跑-出问题-学进去-变更好”的增强回路。
这让它们可以用相对较少的数据,实现模型能力的快速迭代。
这套“开源模型 + 工程中间件 + 场景数据闭环”的组合拳,是资源有限的创业公司在巨头阴影下找到的最优生存策略。
它不追求全面超越特斯拉,而是追求在“末端物流”这个细分场景里,做到成本、可靠性和落地速度的综合最优。
三、 从“仿真”到“上板”:硬核工程才是技术的“最后一公里”
工作坊中最“硬核”、也最体现斑陌易行肌肉的部分,是关于工程化部署的分享。
这恰恰揭示了AI落地中最残酷的真相:实验室里99.9%精度的模型,和路上跑着不“死机”的产品,中间隔着一道名为“工程化”的鸿沟。
他们详细拆解了从“仿真”到“上板”(把模型部署到车载计算芯片)的全流程炼狱:
1、仿真测试
在投入真金白银造出实车前,先在虚拟世界里用“数字孪生”技术,让AI模型在成千上万种极端、危险的路况中疯狂测试。
这不仅能提前发现算法缺陷,还能大幅降低实车路测的风险和成本。
2、中间件集成
如何把庞大的神经网络模型“塞”进车规级芯片有限的计算资源和内存中,同时还要保证与传感器、底盘控制的实时通信稳定,这需要极深的嵌入式系统和软件架构功力。
3、量化与优化
为了让模型能在车载芯片上跑得快、跑得稳,需要对模型进行“量化”(降低计算精度以提升速度)和“剪枝”(去掉不重要的参数以减小体积),这个过程犹如“戴着镣铐跳舞”,需要在性能和精度之间找到最佳平衡点。
这些枯燥的技术细节,才是将“AI大脑”从PPT变为街头可靠运力的关键。
它考验的不是论文发表能力,而是扎扎实实的、能把代码变为安全行驶里程的系统工程能力。
五、结语:无人驾驶的“安卓时刻”即将到来?
斑陌易行的这次技术分享,像一把钥匙,为我们打开了观察无人驾驶产业未来格局的一扇新窗。
它预示着,随着端到端大模型技术的成熟和开源,自动驾驶系统的开发门槛正在降低,但工程化、场景化的门槛正在急剧升高。
未来,可能不会有一家公司垄断所有“大脑”,但会出现少数几家提供优秀“基础大脑”(芯片+基础模型)的供应商(如英伟达、特斯拉);
和无数家像斑陌易行这样,基于开源或基础模型,针对物流、环卫、矿山、港口等垂直场景,通过极致工程化和场景数据,打造出“最强专业脑”的行业小巨头。
总之,无人车来也(公众号:无人车来也)认为:
当“智慧大脑”可以被更高效地“拆解”、理解、微调和部署,它就不再是巨头的独占魔法,而会像当年的智能手机操作系统一样,催生出百花齐放的应用生态和商业模式。
无人驾驶的“安卓化”时代或许正在到来。
亲!你说呢?
参考文献:斑陌易行BanmeGo公众号文章《2026全球开发者先锋大会| 斑陌易行把无人车的“智慧大脑”拆给你看》
#无人车来也 #无人驾驶 #自动驾驶 #无人车