

作者|毛心如
如果一台人形机器人的设计哲学最终追求是极致仿生,那这台机器人究竟需要什么?
这个问题,回答或许五花八门。
有人会说是一双与人相似的灵巧手,有人会说要用 3D 打印出仿人肌肉,也有人说是给机器人一张逼真的面孔。
这些想法都对,但最关键、也最容易被忽略的一点是,机器人要真的像人,就必须拥有接近人类水平的灵敏触觉。
过去很长一段时间里,人形机器人行业的竞争焦点,始终集中在自由度、灵巧手、算力、运动控制等硬性能维度。
厂商们比拼关节数量、重复定位精度、负载能力,试图用更接近人类的躯体结构,让机器人完成行走、抓取、搬运等基础任务。
但机器人对世界的感知这门必修课,却迟迟没有补齐。
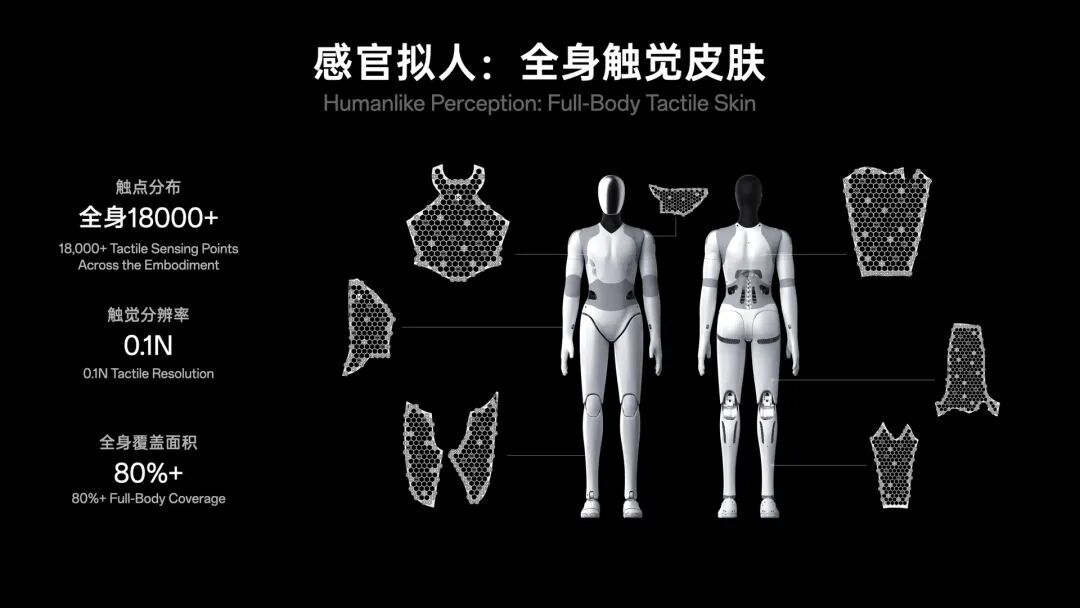
就在这样的行业常态下,一家追求机器人极致仿生的公司,超维动力,发布了他们最新一代人形机器人 KAI,并交出了一份惊艳的触觉感知能力答卷。
KAI 是业内首个实现全身 80% 以上覆盖、搭载 18000 个触觉触点、可稳定感知 0.1N 轻微外力的人形机器人。
它的亮相也标志着机器人全身大面积电子皮肤时代正式开启,触觉成为了具身智能拼图中最关键的最后一厘米。
这一行业首创的成果,引发了社交媒体上网友的好奇,超维动力背后的供应商究竟是谁?18000 个触觉触点是怎么实现的?
答案最终指向了猿声科技,目前唯一能实现万级触点全身电子皮肤规模化落地的企业,同时也是触觉传感器业内少有的六边形战士。

从单点接触到全身覆盖,机器人触觉竞赛正式升维
回溯触觉传感器的发展历史,这项技术已经走过了 50 多年,随着材料科学和 MEMS 技术的演进,触觉传感器开始向柔性化、轻量化、高分辨率的方向发展。
但产业竞争的核心,目前基本都在围绕灵巧手展开。
厂商们专注于提升单点或小面积传感器的精度、响应速度,试图让机器人的手能更精准地抓取物体、区分材质。
这种局部触觉,是从机器人替代生产力的功能性角度出发,忽略了人机交互、情感连接、复杂场景适应等更高维的需求。
基于此,一个行业共识也逐渐浮现,只靠指尖触觉,永远无法让机器人真正融入人类生活。
机器人想要走进家庭、服务场景,实现类人化交互与安全协作,就必须拥有覆盖全身的触觉感知能力。
这场触觉竞赛也需要从单点精度,升级为阵列式、大面积、仿生级的全身感知能力比拼。
而超维动力 KAI 搭载的 18000 触点全身电子皮肤,就是这场竞赛升维的标志性产物。
一个覆盖全身的电子皮肤,到底意味着什么?为什么人形机器人需要这么高的触觉密度?
答案可以分为短、长两个时间维度来看。
短期来看,在 B 端工业场景,机器人干活主要在工位上完成定点操作,大面积全身触觉皮肤并不是必需品。
在当前阶段,大面积全身触觉还不是所有机器人厂商的标准配置,但它正在成为高阶人形机器人拉开代际差距的关键能力。
长期来看,当机器人真正走进家庭 C 端场景,高密度全身触觉就变得不可或缺了。原因有四个层面:
首先,高密度触觉是实现类人情感交互的前提。
人与机器人产生情感连接,触觉是很重要的通道。机器人不仅要能听懂语言、完成指令,更要理解拥抱、拍打、抚摸等动作的情感含义。
只有遍布全身的高灵敏触点,才能精准区分不同交互动作的意图,让机器人拥有情感感知能力。
其次,全身高密度触觉才能推动机器人从被动安全向主动安全跨越。
全身触觉传感器可以实时感知外力接触,让机器人在靠近人体、接触物体时拥有真正的交互分寸感,通过主动柔性减速、刹车,解决人机共融的安全痛点。
与此同时,单纯依赖视觉与力觉的感知方案,在真实复杂场景中存在天然局限性。
视觉容易受光照、遮挡、反射干扰,无法感知物体软硬度、表面纹理、微小形变;力觉核心在于检测整体受力,无法区分接触位置、受力分布、滑动趋势。
而柔性电子皮肤可以填补这一空白,成为机器人实现安全柔顺交互、完成复杂物体精细操作的最后一厘米。
更重要的是,全身高密度触觉将打开一种新型数据获取方式。
机器人或者由人穿着高密度电子皮肤,通过大面积触觉感知,持续获取压力、形变、滑动、纹理等多维度数据,从而在陌生环境里自主学习、自适应决策。

当然,把 18000 个触点铺到机器人近 80% 的体表面积上,难点不在于点数本身,而在于点数背后的系统工程。
一个触点能工作,不代表一万个触点能稳定工作;一块柔性传感器能贴平面,不代表它能覆盖机器人关节、曲面和长期运动区域;一次 Demo 能跑通,也不代表它能进入可交付、可维护、可复制的产品体系。
全身电子皮肤的门槛,本质上是材料、结构、电子、算法、标定、通信、封装和量产的一次综合考试。
传统的电子皮肤方案大多采用多路复用读取架构,即通过行和列的扫描来采集信息。这种架构更加适配小面积应用,一旦传感器阵列扩大、触点增多,扫描频率就会下降,数据延迟上升。
传统的中心化加外置读取器方案,往往只能支撑几百到小几千个触点,无法突破大面积高密度的工程瓶颈。
更棘手的是大面积部署带来的工程挑战,触点密度越高,信号串扰和一致性问题的复杂程度就会成倍叠加。
机器人本体运动时,关节处的拉伸会不断拉扯传感器,产生大量「误触」信号,这需要从数据层面一一滤除。
此外还有走线、功耗、与机器人结构件的兼容等一系列之前没有标准答案的问题。
所有困难都是新的,因为没有人在这之前真正做出过这么大面积覆盖人形机器人的电子皮肤。
猿声科技之所以能实现这项史上最高密度的全身电子皮肤记录,不是因为其他玩家不想做,而是他们还没有找到可行的实现路径。

猿声科技,触觉传感器领域少有的六边形战士
18000 个触点,到底是怎么做出来的?
颠覆性的读取架构、模块化产品设计、全栈技术能力,以及对行业痛点的深刻理解,缺一不可。
其真正的壁垒,不是单一指标领先,而是系统工程能力:材料、结构、读取架构、边缘计算、标定、封装、量产一致性同时成立。
支撑机器人 KAI 实现 18000 触点全身覆盖的核心,是猿声科技自研的 HexSkin 模块化大面积触觉传感器方案。
在高密度与大面积适配层面,HexSkin 采用六边形模块化设计。
六边形拓扑结构具备最优拼接特性,既能最大化利用空间,又能适配机器人不规则曲面,模块之间可实现无限拼接、自主组网,能够快速完成大面积皮肤部署。
这种设计让传感器最大可覆盖 1.23 平方米面积,支持高达 34000 个感知触点,远超行业传统方案几百至小几千点的上限,完美满足 KAI 的 18000 触点的需求。

同时,传感器模块连接处具备双向拉伸特性,可跟随机器人关节运动自由形变,不会因拉伸、弯折影响感知性能,解决了复杂曲面覆盖难题。
在性能指标上,HexSkin 实现了灵敏度与高速响应的双重突破。
传感器可稳定实现 0.1N 感知阈值,这相当于能感知 10 克砝码、几滴水的轻微触碰,即便极其微弱的抚摸、按压都能精准捕捉。
在高密度部署的前提下,传感器能维持 60Hz 扫描频率,每秒可处理近 200 万个点位数据,响应延迟极低,保证机器人实时做出精准交互反馈。
除此之外,HexSkin 具备多维感知能力,可同步检测压力、滑动等信息,配合感算一体边缘计算架构,实现数据本地处理、快速反馈,避免集中式处理带来的延迟与带宽压力,让 18000 个触点同步稳定工作。
面对全身电子皮肤的行业共性难点,猿声科技选择逐一击破。
针对信号一致性与标定复杂问题,HexSkin 采用去中心化分布式读取架构,每个六边形模块负责周边小范围数据读取,模块之间通过协议互联、协同工作。
这样摆脱了传统多路复用架构点位越多、速度越慢的困境,保证全身触点信号稳定、精准。
针对柔性与耐用性平衡问题,团队采用特殊柔性材料与封装工艺,让传感器兼具柔软触感与结构强度,可承受机器人长期运动、关节拉伸带来的反复形变。

更值得一提的是,猿声科技实现了高性能与低成本、可量产的平衡。
传统方案想要实现万级触点,要么是成本高企,要么底层技术难以实现,而猿声科技将大面积机器人覆盖电子皮肤的成本控制在四位数,打破了高性能一定高成本的刻板印象。
与此同时,猿声科技建立的完善量产体系,实现了传感器生产一致性控制,良率、稳定性满足人形机器人批量交付要求,让全身电子皮肤从实验室概念,真正走向可落地、可复制的商业化方案。

触觉传感器要成为机器人的全身标配
在发布会的喧嚣过后,我们也要对电子皮肤有更清醒的认知,大面积全身触觉皮肤还没有真正迎来产业拐点。
现在,大面积触觉皮肤更像汽车圈里的概念超跑。大部分概念超跑的技术会经过一段周期后逐渐下放到量产车型上,电子皮肤的落地节奏也会类似。
从行业发展阶段来看,全身电子皮肤会经历概念标杆→场景验证→标配普及的演进路径。
从具体场景来看,B 端工厂目前不需要全身皮肤,泛 C 端有少量需求但不强烈,家庭 C 端才是真正需要它的地方,保守估算还需 3-5 年时间。
但从另一个维度看,市场和政策的信号已经在集中释放。
产业端方面,国内外多款前沿机器人已开始搭载电子皮肤方案。
国内方面,矩阵超智的人形机器人 MATRIX-3 采用行业首创的三维编织柔性织物,内嵌分布式传感网络,触感柔软亲和,能缓冲意外接触并感知接触位置与力度。
成都人形机器人创新中心自研的机器人贡嘎一号也集成了全球首个 AI 神经网络电子皮肤。
海外方面,特斯拉 Optimus、Figure AI 等机器人除了手掌以外,在脚掌、躯干等部位也已应用电子皮肤。
与此同时,人形机器人全球出货量从 2025 年约 1.88 万台增长至 2030 年约 51 万台的预期,也在持续拉高触觉传感器和柔性传感系统的需求。
与市场增长同步的是,行业需求结构发生明显转变。
B 端工业、商用场景中,指尖触觉已成为刚需;而在 C 端家庭、陪伴场景中,全身电子皮肤的需求也在攀升,让触觉传感器逐渐成为机器人不可或缺的核心配置。

政策标准层面也在发力。今年年初,工信部正式发布了《人形机器人与具身智能标准体系(2026 版)》,这是我国首个覆盖人形机器人全产业链、全生命周期标准的顶层设计。
其中,有关触觉传感器的标准化方向已经明确,从高度定制化走向模块化、通用化只是时间问题。
长远来看,触觉传感器将成为具身智能的感知新基建。
未来的具身智能机器人,想要真正实现知行合一,就必须让触觉传感器像人类肌肉与神经一样遍布全身,形成视觉 + 力觉 + 触觉三位一体的感知体系。
没有全身触觉,机器人永远只能完成标准化、结构化任务,无法适应非结构化的家庭场景,更无法实现真正的人机共融。
站在更大的技术坐标系里看,越来越多的具身智能基础模型开始将触觉纳入多模态训练的早期环节。
触觉感知不再是视觉感知的补充,而是从模型训练第一天起就与其他模态同步标注、联合训练。
这意味着机器人会逐渐学习到物理世界的触感语义,理解接触、摩擦、质感的背后因果。
从行业竞争格局来看,触觉传感器赛道已经形成技术壁垒主导、头部集中加速的趋势。
猿声科技凭借去中心化读取架构、六边形模块化设计、全栈技术能力,构建起独特的技术壁垒,同行短期内无法复制。
实事求是地讲,现在还没有到需要大面积皮肤的时间点。
但当人形机器人从工厂产线真正走进千家万户时,没有全身皮肤的机器人,可能会像一台没有触摸屏的手机一样,显出年代感来。
而猿声科技先用一款标杆化产品,向我们展示了未来机器人触觉感知的理想形态。