
作者|苏涵
提到双足人形机器人,你脑海里浮现的是什么?
是踉跄走路、花式炫技,还是实验室里精心编排的舞蹈?它们能整各种花活,但离「干活」似乎始终还隔着一段距离。
虽然过去几年,双足人形机器人一直在快速进步。
但与此同时,行业也开始出现一个新的问题:机器人越来越会「动」,却依然很难真正理解环境、适应任务。
也因此,具身智能行业的竞争重点,正在慢慢发生变化。
比起「能不能走」,越来越多人开始重新关注另一件事:机器人到底能不能真正理解现实世界。
6 月 2 日,星海图正式推出首款双足机器人「行客 Kengo」。
而就在发布双足机器人的前一天,星海图刚刚发布了最新一代具身智能基础模型 G0.5。
该模型基于 VLA(视觉-语言-行动)架构设计,未来将逐步与 Kengo 结合,进而实现更强的大脑能力和通用操作能力。
如果把两个产品联系到一起,会发现星海图这次真正想推进的,或许已经不只是「双足机器人」本身,而是机器人开始从「会动」,逐渐走向理解世界。

一家头部「大脑公司」,为什么开始做双足?
在具身智能领域,星海图一直是一个比较特殊的存在。相比很多先做硬件本体的公司,它更早把重心放在了基础模型与泛化能力上。
因此,它被业内视为具身智能赛道拥有「最强大脑」的公司之一,其基础模型能力始终位居行业前列。
然而,这家一向以「大脑」见长的公司,为什么会突然开始做双足机器人?
答案其实并不复杂。
过去几年,行业对于双足机器人的关注重点,大多集中在「身体能力」上。
比如能不能走稳、能不能跑跳、能不能完成复杂动作,甚至后空翻、跳舞、踢球,都曾是行业关注的重点。
但问题在于:会动,并不等于理解世界。毕竟现实世界,远比实验室复杂得多。
当机器人真正进入现实环境,面对的不只是平地和固定路线,而是随时变化的空间关系、陌生物体、随机任务,以及大量无法提前预设的情况。
而这些问题,本质上已经不再只是运动控制问题,而是「理解能力」的问题。
也因此,越来越多公司开始重新意识到:决定机器人上限的,可能已经不只是身体,而是大脑。
这也是为什么,星海图会在推出双足机器人之前,先发布 G0.5 具身智能基础模型。
相比以往更偏「固定流程」的控制逻辑,G0.5 更强调机器人对环境、任务与空间关系的理解,具备「零样本泛化」能力。
它基于 VLA(视觉-语言-行动)架构设计,尝试让机器人从机械执行,逐渐走向「边理解、边行动」。
如果 G0.5 基础模型后续逐步与 Kengo 结合,那么双足机器人可能就不再只是「怎么走」,而是开始真正理解环境、适应任务,从而极大程度上提升了双足机器人的实际操作空间。
事实上,作为一家「大脑公司」,星海图此前推出的R1轮式双臂机器人,在全球顶级开发者中的覆盖率超过90%,包括斯坦福李飞飞团队等顶尖机构都在使用,这也证明了星海图的大脑能力是「开发者首选」。
但是要让公司长期积累的智能能力,进入服务、商业、家庭等高价值场景,把智能转化为实实在在的生产力,就需要一具更通用的身体。

所以做双足,是自然的选择,这也是星海图从「开发者首选」迈向「生产力标杆」的关键一跃。
这不是跟风,而是作为一家大脑公司,为未来通用的生产力场景,进行一次提前布局。

双足机器人,终于开始接近「有用」
如果你去翻看市面上大多数双足机器人的发布会视频,核心卖点无非是走路、踢腿、后空翻。
本质上这些还是运动控制表演。虽然好看,但离「有用」很远。
而 Kengo 可以通过可靠的本体设计、高性能的运动小脑以及具身智能大脑,让机器人在移动过程中保持精准动作与稳定平衡,进而在未来赋能更多真实场景。
这种差异,也让星海图形成对传统双足机器人厂商的「降维打击」。
毕竟,传统厂商的壁垒在硬件,比如关节、驱动、集成。这些东西确实难做,但问题是,它们的 AI 能力普遍薄弱。
造成的结果就是,机器人「能走但不能干」,一旦换个场景、换个任务,立刻失灵。而星海图的壁垒则完全不同。
作为全栈能力最强的模型公司,它的核心是「模型驱动硬件」。软件迭代拉动硬件升级,数据飞轮让机器人越用越聪明。这种能力,传统硬件厂商很难复制。
另一方面,Kengo 在本体可靠性上的设计,也明显是朝着长期运行去的,比如跌落 10 次不坏,长期运行免频繁维修。
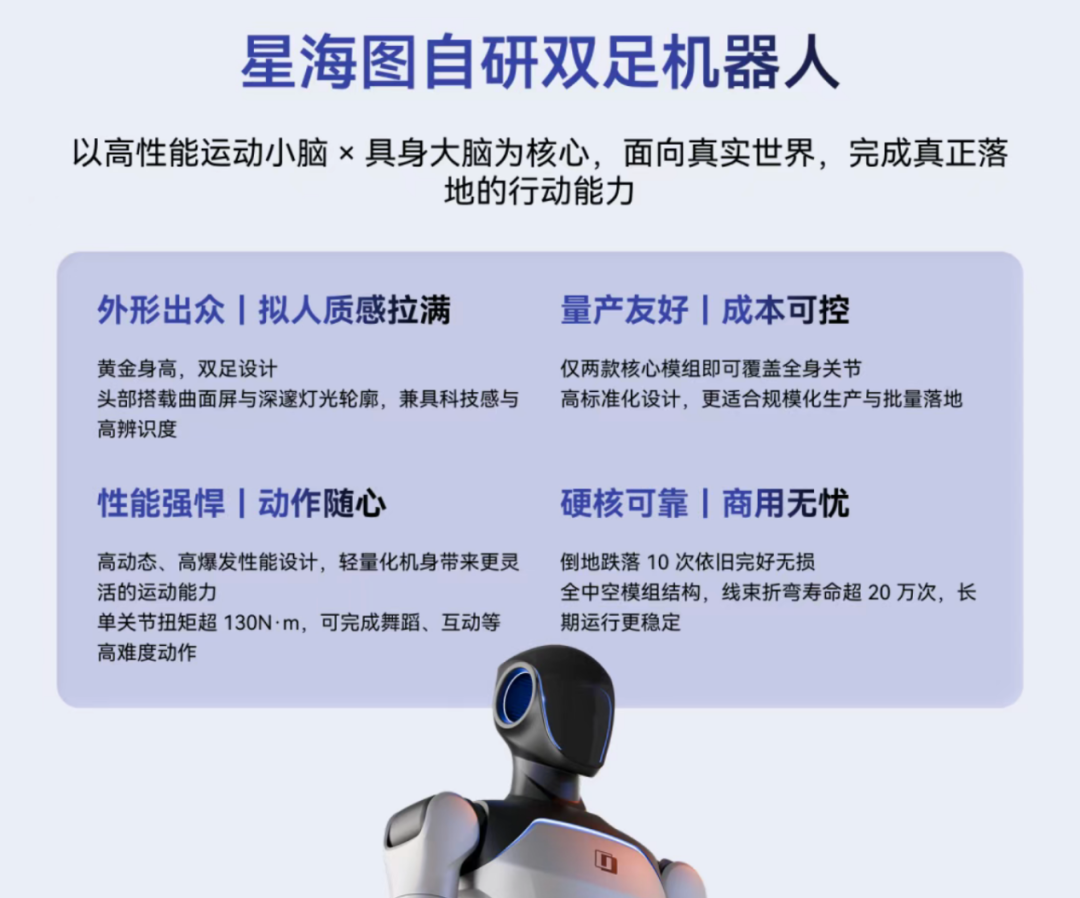
实际上,过去很多双足机器人难以商用,一个现实问题就是「太娇贵」:摔不起、修不起、维护成本高。而 Kengo 从一开始,就更强调真实环境下的长期稳定运行能力。
这些变化放在一起看,其实也折射出一个正在发生的行业趋势:2026年的具身智能竞争,也正在从「运动控制」逐渐转向「泛化智能」。
过去行业更关注「身体能力」,比如能不能走稳、动作够不够复杂、运动控制够不够强。但现在,「大脑能力」才是行业关注的重点。
因为身体可以持续迭代,但真正决定机器人上限的,开始变成泛化能力、空间理解与任务推理能力。
而星海图选择在这个时间点推出 Kengo,本质上也是在尝试回答一个问题:双足机器人,能不能真正成为下一代通用生产力工具。毕竟,无论是服务、商业还是家庭场景,真正需要的,从来都不是一个只会后空翻的机器人,而是一个能够理解环境、适应任务,并长期稳定运行的智能体。而这,或许才是双足机器人真正开始接近「有用」的关键一步。