
随着这几年AI大模型的发展,各地的黑客松活动越来越多了。近两年的主题,大多都是围绕大模型或Agent,来做具体软件应用。一是因为大语言模型和多模态模型已经相对成熟,具备一定的落地性。二是大家已经有了“有非常牛逼的资源才做得起底层大模型”的共识。但反观硬件方面,特别是具身智能,情况就大不一样了。具身现在还在底层技术的探索期,远未达到成熟,所以相关黑客松活动是少之又少。所以,当我看到下面这个「“开源开放 共创共赢”具身智能黑客松赛事」,就决定推荐给做具身的朋友们。
主办方是「北京人形机器人创新中心」和「百度智能云」,所以比赛蛮有含金量的。简单介绍一下。北京人形机器人创新中心,简称北京人形。它是国地共建具身智能机器人创新中心,由京城机电、北京优必选、小米、亦庄机器人四家股东牵头成立,定位是国内首家具身智能软硬件全栈科技公司。
也就是,它不是只做机器人身上的某个零件,而是把机器人本体、数据采集训练、中试生产、标准验证、软硬件测试放在一条链路里做。
它推出过通用机器人平台具身天工,也推出过通用具身智能平台慧思开物。一个更像身体,一个更像让身体学习和进化的底座。
百度智能云,百度家的AI原生云服务平台,强调云智一体、智能优先。百度百舸平台通过自动弹性容错机制,能保障千卡规模集群模型有效训练时长占比达到99.5%,支持具身客户进行VLA、VLM和世界模型的训练与仿真,同时提供开发机、数据集等产品能力,提高模型开发效率,也加强具身数据资产管控。
赛事的具体内容,不同于现在常见的应用项目类黑客松,而是聚焦于具身智能的基础技术。
两条赛道,解决具身两大最关键的问题。
一是“运动控制(Locomotion)”。让人形机器人稳稳地走、跑、过复杂地形,别动不动就摔。
二是“VLA模型微调(Manipulation)”。让机器人看见东西,听懂人的话,再把任务真的做出来。
先站得住,再干得了活。
这就是人形机器人走向现实世界最朴素、也最难的两道门。
具体来说,运动控制赛道,其实是在考机器人最基本、也最底层的能力。
参赛团队会围绕具身天工机器人平台,基于TienKung-Lab、xGMR、xSIM_MUJOCO、Deploy_Tienkung等开源工具链,训练稳定、鲁棒、可迁移的运动控制策略。任务可能覆盖基础步态、复杂地形、速度与姿态控制、抗扰恢复、动作模仿和泛化。

https://github.com/Open-X-Humanoid/TienKung-Lab
听起来技术词很多,但逻辑并不难。
xGMR像一个动作翻译器,可以把人体动捕或视频数据,转成机器人能学习的专家轨迹。TienKung-Lab像训练场,基于IsaacLab开发,把强化学习和人体运动数据结合起来,也用到类似AMP的风格化奖励机制,让机器人不只会动,还尽量动得自然、稳定、高效。
xSIM_MUJOCO像更接近真实世界的模拟环境,靠更细的物理参数映射提高训练质量。TienKung-Lab还支持MuJoCo里的Sim2Sim交叉验证,并改进深度图和激光雷达点云获取。Deploy_Tienkung则像最后一座桥,把仿真里的策略送到真机上。
主办方还贴心提供了TienKung-Lab的配套课程和资料包,可供选手们学习。
https://opensource.x-humanoid-cloud.com/plugin.php?id=keke_video_base&ac=course&cid=17
此外,也有xMIMIC项目。xMIMIC是面向机器人高动态技能的动作训练框架,支持托马斯旋转、舞蹈、跑酷等动作的训练,实现模仿学习与强化优化的一体化训练流程。
线上阶段更看仿真训练和评测,线下阶段会进一步看真机或半实物环境里的Sim2Real能力。
也就是说,不能只在模拟器里跑得漂亮。
真实机器人稳不稳,才是最后的考卷。
这套路线已经有公开验证。TienKung-Lab所承载的运控算法支撑天工Ultra拿下人形机器人马拉松冠军,并已在天工造物局、Github、Gitee等平台开放。
天工1.0lite曾实现全尺寸纯电驱拟人奔跑,并能在斜坡、楼梯、草地、碎石、沙地等地形移动。2024年中关村仿生机器人大赛里,天工拿过竞速、障碍等冠军,并在作业赛中成为唯一完成任务的足式人形机器人。在2025年初,天工奔跑时速从6km/h 提升到了12km/h,也做过视觉感知行走、百级台阶攀登、雪地奔跑和外力冲击下保持平衡。

另一条VLA模型微调赛道,更接近我们想象中的日常机器人。
VLA是视觉、语言、动作。简单说,就是让机器人看见场景,理解一句人话,然后生成一串可以执行的动作。比如识别物体并抓取,单臂或双臂协作,使用工具,把东西放到指定位置,根据语言指令完成多步骤操作,甚至在开放场景下泛化执行。
这事说起来容易,做起来很难,因为看懂不等于做成。
一个模型能说出桌上有杯子,不代表机械臂能把杯子稳稳拿起来。它知道目标在哪里,不代表它知道手该怎么伸、什么时候停、力该用多大。
这就是具身智能和普通多模态AI的差别。
它不只考理解,还考执行。
这条赛道会基于RoboMIND数据集、x-humanoid-training-toolchain、LeRobot适配工具链,以及天工机器人的操作能力,完成模型训练、任务适配与操作策略优化。
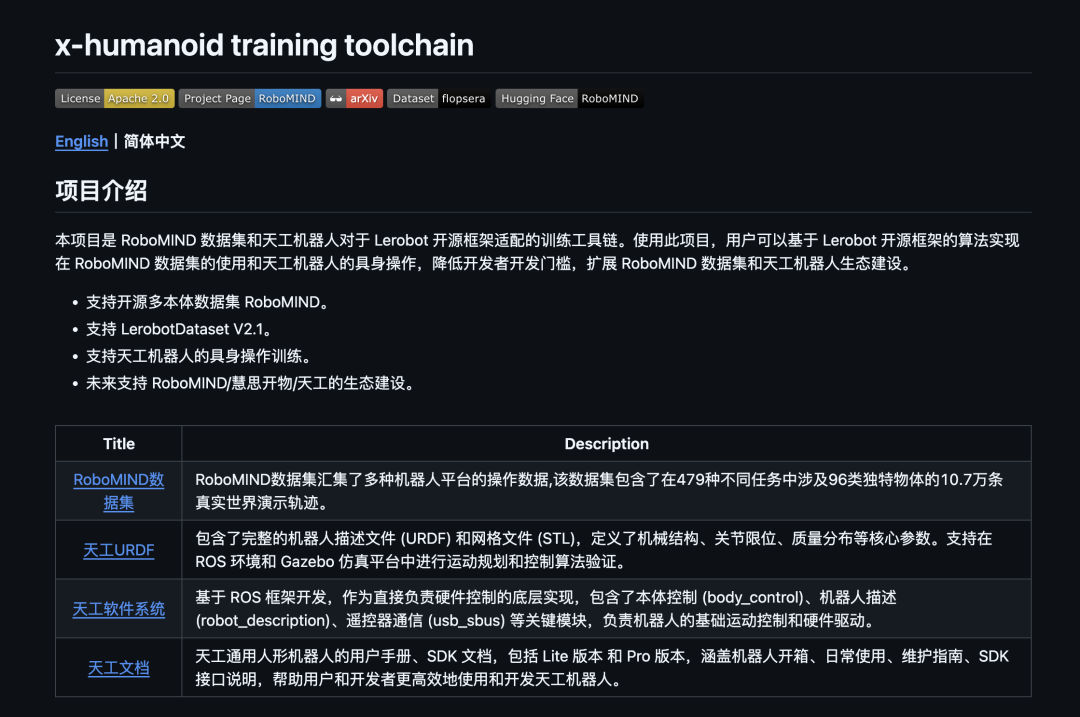
https://github.com/Open-X-Humanoid/x-humanoid-training-toolchain
RoboMIND,是标准化、大规模、多本体、多模态的机器人操作数据集。系列累计数据量40余万条,下载量突破600万次,在HuggingFace等平台位居前列。最新的RoboMIND 2.0版本,集成了双臂移动平台、灵巧手操作、触觉数据,并配套了高保真仿真环境及评测开源。
配合开源URDF模型、ROS控制栈和X-Humanoid training toolchain,开发者可以把HDF5格式数据转换成LerobotDataset V2.1格式,更快接入LeRobot框架。
这对小团队很重要。
很多人以为技术创新卡在灵感,其实更多时候卡在脏活。数据格式不统一,训练框架接不上,硬件适配一层层报错。工具链的价值,就是把这些麻烦尽量收起来,让开发者把精力放回真正的问题。
所以这场比赛的资源组合很清楚。
北京人形提供机器人本体、数据、仿真、运动控制工具链、RoboMIND和VLA训练工具链。百度智能云提供算力、数据与AI基础设施。一个更靠近身体,一个更靠近模型训练,合在一起,才像具身智能真正需要的工作台。
比赛激励也很实在。
总奖池高达百万。冠军赠送具身天工3.0本体一台。决赛中表现优秀的队伍,将由北京人形推荐参加世界人形机器人运动会。

完成报名就送算力资源包。作品提交并审核通过后,还能获得具身天工3.0本体购买优惠券,符合条件的队伍共同瓜分总额50万元的采购代金券。
赛事报名及战队征集截止到6月20日。线上初赛及赛事答疑截止到7月底。线下决赛截止到8月中旬。
高校实验室可以带着复杂地形运控、抗扰恢复、VLA多步骤操作这些问题来。机器人公司或AI企业,可以把它当成一次真实压力测试。创业团队也可以把它当成一次直接校验,不看故事讲得多漂亮,看模型和策略能不能在物理世界留下痕迹。
我们过去两年太习惯屏幕里的AI了。问一句,答一段;丢一张图,它能分析;给一个需求,它能写方案。可只要AI走出屏幕,事情立刻变得没那么优雅。
地面不是永远平的,灯光不是永远合适的,杯子不会乖乖摆在标准位置。机械臂抓东西,角度差一点就掉;机器人走路,重心偏一点就晃。
具身智能真正迷人的地方就在这里。
它不是让AI多写几句话,而是让AI面对重力、摩擦、碰撞、延迟、误差,以及那些现实世界里随时冒出来的小麻烦。
这场黑客松值得关注,是因为它把这些小麻烦摆到了开发者面前。
重力、摩擦、细碎的现实难题,困住了 AI,也成就了具身智能,而这场黑客松,便是奔赴这场挑战的起点。