
作者|毛心如
具身智能赛道正在经历一场无声的路线分歧。
过去两年,行业的目光高度聚焦在机器人本体上。
谁能做出更灵活的灵巧手、更稳定的双足结构、扭矩更大的关节,谁就更有优势。
与此同时,各家都在往机器人脑袋里塞进越来越大的端侧模型,仿佛端侧算力越强,离通用智能就越近。
每一次端侧能力的展示都在强化一个印象,具身智能的竞赛,是硬件的竞赛、端侧算力的竞赛。
但一个真相一直被忽视,机器人本体是有极限的。
一台人形机器人的电池容量通常只有半度电到两度电。相比之下,一辆电动汽车的电池动辄五十度电起步。
这意味着机器人要在几十甚至几十分之一的能量预算内,完成感知、决策、控制、执行等高耗能任务。
功耗、散热、体积、成本构成了一道无形的天花板。往端侧堆芯片,算力上去了,续航就崩了;保住续航,就得牺牲智能。
试图把最强大脑塞进机器人小小的身体里,本质上是在做一个不可能三角的妥协。
这种妥协在实验室里或许还能走通,机器人插着电源、连着网线、身后站一排工程师随时待命。
但一旦走到真实场景,比如物流仓库里全天候分拣、商超里连续理货八小时,这个三角就会摇摇欲坠。
于是,一个灵魂拷问出现,让每一台机器人都背一个最强大脑,真的是最优解吗?

机器人与智驾的本质差异,决定了两条不同的技术路线
很多人喜欢把机器人和智能驾驶放在一起比较,毕竟两者的底层技术栈很像,都涉及感知、规划、控制的全链路。
但两者的物理约束、使用场景、能量供给完全不在一个维度。如果硬把智驾的演进模式套在机器人身上,就会陷入逻辑误区。
智能驾驶的核心模式,是车端实时推理 + 云端持续训练。
车必须保证极端安全与实时响应,所以感知、规划、控制必须在车端完成;云端更多负责模型迭代、数据回传、全局优化。
这是由汽车的安全属性决定的。
同时,智驾能这么干,也是因为车端有一块几十度电起步的巨大电池,它耗得起算力,也装得下复杂的散热和传感器系统。
但机器人不一样。
它不需要像汽车一样快的实时决策,却要面对更严苛的功耗限制、更复杂的物理交互、更多样的场景任务。
在一个电量极其有限的机身里,它既不需要、也不可能装下能应对所有任务的超级模型。
这意味着,智能驾驶的那套逻辑,不能直接套在机器人上,机器人对端侧瘦身的需求比智驾行业要迫切得多。
机器人完全可以走出一条更彻底、更适合规模化的路线,即云端大脑 + 端侧小脑。
而这种差异的产生也很好理解。
智驾从诞生之初就面临量产这个硬约束,车是要卖出去的,成本、功耗、可靠性是生死线,任何不可量产的技术路线都会被快速淘汰。
具身智能目前量产压力还没真正传导到技术决策层。
但随着资本趋于理性、客户开始要求真正的落地回报,这个传导正在加速。
2026年被业内广泛认为是数据元年,某种程度上也是量产焦虑元年,大家会开始发现,端侧堆算力的路,走到量产阶段会有越来越多困难。

云端大脑 + 一身多脑,一条反直觉的技术栈正在被验证
灵御智能,是这条云端大脑路线的践行者之一。
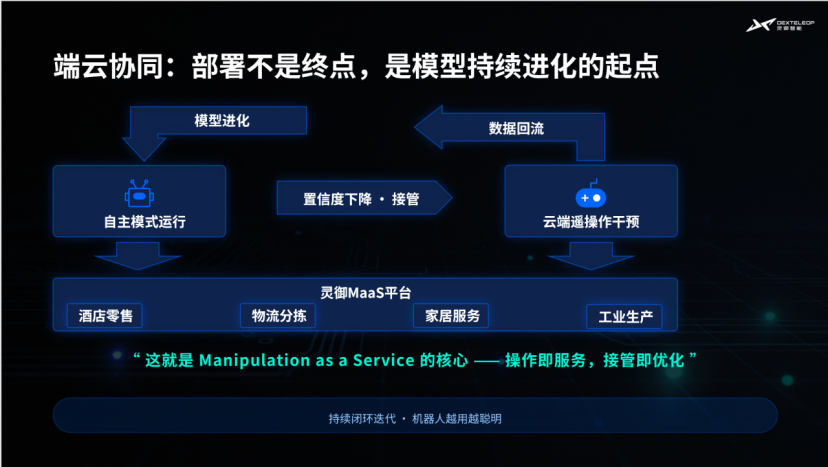
它没有选择行业主流的端侧堆算力路线,而是以终为始,将系统架构设计成了端云协同。
具体来说,机器人本体只负责实时运动控制和高质量数据采集,认知、推理、学习全部放在云端。
这个选择显然是反直觉的。
长期以来,行业的主流叙事是端侧自主,机器人不依赖网络、不依赖云端,关起门来也能干活。
这种叙事听起来很性感,也符合人们对智能的直觉想象。
但问题在于,这种自主是以极高的端侧硬件成本、功耗代价和场景泛化能力的牺牲为代价的。而且,在很多真实场景里端侧自主并不是必需品。
毕竟,现实是,物流仓库会有稳定的 Wi-Fi 覆盖,商超会有 5G 信号,工厂会有专网。
真正适合规模化部署的路径,不是让每一台机器人都背负一个越来越重的端侧大脑,而是让同一套高性能物理本体,通过低延迟、高确定性的通讯架构接入云端专家模型池,根据不同任务调用不同能力。

这个判断有两个核心支撑。
第一,通讯技术已经足够成熟。
很多人对云端大脑会担心延迟、断网的问题。
灵御团队把端到端的控制链路拆成了 20 个环节,用示波器逐个环节测量、优化,最终把端到端总延迟压缩到了 90 毫秒以内。
其中,城内公网传输延迟约 4 毫秒,1000 公里的跨城公网传输只增加约 10 毫秒。
通俗理解,人类视觉的延迟感知阈值大约在 100-150 毫秒,也就是说,北京的操作员可以实时操控成都的机器人做理货,而操控者几乎感觉不到时延。
至于断网,灵御智能的方案是分层降级。网络抖动时端侧小脑接管底层控制,网络中断超过阈值则安全暂停。
第二,端侧不需要理解任务,只需要执行指令和采集数据。
端侧路线的假设是机器人必须在本地完成全链路,这意味着端侧芯片要足够强、模型要足够大,而且这个模型必须能应对所有可能遇到的任务。
但这在真实场景里几乎不可能。
云端路线的设计是,端侧只需精准执行云端指令并高质量采集数据,理解、推理、规划全交给云端。
云端可以部署多个专家模型,每个模型只擅长一类任务,系统根据任务类型动态调度。
这也是灵御智能提出的另一个技术创新点,一身多脑。同一台机器人本体,可以根据不同场景接入不同的云端专家模型。
面对物流搬运,调用工业脑;面对精密装配,切换精工脑;面对商业服务,启用服务脑。甚至同一个任务的不同阶段,也可以动态切换不同的专家模型。

这种设计的直接好处是,不需要一个能搞定一切的万能模型。
机器人的大脑设计比大语言模型复杂得多,物理交互涉及力、触觉、多模态信号,每个任务的物理约束完全不同。
更务实的路径是多个专家模型协同加一个聪明的任务路由机制。
把一身多脑再往前推一步,会看见一个更底层的设计理念,人机同构。
灵御智能的云原生管线在架构层面实现了高度统一,既支持云端 AI 模型通过 API 直接操控机器人,也支持人类通过远程设备沉浸式遥操机器人。
对于机器人本体而言,它根本不需要区分今天指挥它的是 AI 还是人。两路控制信号走同一套通讯协议、同一个延迟保障、同一个数据反馈回路。
这个设计打开了一个非常重要的能力,L2 级人机混合接管。
借用智能驾驶的分级定义,AI 模型主导执行,当模型置信度下降,人类远程操作员无缝接管;任务度过困难环节后,控制权交还给 AI。
这种模式大幅降低了对 AI 模型的完美性要求,每一次人类接管都生成高质量训练数据,一个远程操作中心可以同时兜底上百台机器人。

数据飞轮 + 开放底座,云端架构的真正终局
架构再好,能不能跑通,最终还得看数据。
云端大脑再强,一身多脑再灵活,没有高质量数据支撑,也只是空壳。
2026 年被行业普遍认为是数据元年,是因为大家越来越明白,算法差距会缩小,但数据差距会越来越大。
仿真永远替代不了真实物理世界的力、触觉和接触形变,这些只能靠真机采集。
而当前行业在真机数据采集上面临三个现实困境:
成本高:高精度遥操方案设备昂贵,规模化经济可行性不足
效率低:人工遥操易疲劳,复杂动作成功率低
质量不稳定:多传感器时间不同步、空间定位精度不足,数据难以用于训练
针对这三个点,灵御智能选择先解决硬件本身的数据质量,再通过架构设计让数据采集和模型进化形成闭环。

它的 TA 机器人从设计之初就追求极致同步与高精度,保证采出来的数据干净、对齐、可直接训练,不用大量人工清洗。
更重要的是,数据采集不是孤立存在的。
每一台机器人部署到真实场景,采到的数据自动回流到云端模型池;模型训练优化后,再重新部署到机器人身上。
数据不会采完就废,而是持续进化的燃料。
在实际场景测试中,TA 机器人完成同场景任务的耗时仅为同类方案的 30% 甚至更低,单日有效采集 800 余条,单次任务数据成本可做到 0.6 元左右,不到行业平均水平的五分之一。
除此之外,这套完整的技术架构的价值不在于成为一个单点工具,而在于构建一个开放的行业通用底座。
具身智能行业现在的普遍问题是重复造轮子,从底层驱动到数据采集,每家公司都在各自为战。
结果就是算法很难跨硬件复用,数据没法跨平台共享,换个场景就得从头再来。
要想从手工作坊走向规模化,关键就是建立标准化的基础设施,即硬件接口有标准,数据格式有标准,通讯协议有标准。
灵御智能的云端架构,本质上就是在做这件事,把硬件、通讯、数据、云端能力全部标准化,做成开放的 MaaS (模型即服务)平台。
算法开发者不用再纠结底层适配,专注做好模型就行,接个 API 就能用。
它不是先做产品再补生态,而是先定底座、定接口、定标准,再让整个生态在上面生长。
硬件可复用、算力可共享、数据可互通,行业效率才能真正上来。
具身智能的竞赛,本质上是一场关于进化效率的竞赛。
单台机器人的单次能力突破,只能赢得一时的关注,而一个能够持续产生数据、持续优化模型、持续适配场景的底座,才能赢得终局。
从这个角度看,云端大脑不只是一个技术选择,更是一种关于进化效率的底层设计。
它让机器人不再是一次性的硬件资产,而是一个可以持续迭代、跨场景复用、成本边际递减的智能系统。
而当行业的目光从硬件参数和模型规模,转向数据质量与闭环效率,真正的规模化时代才刚开始。